
En robot som lär sig på ett mänskligt sätt
Kan robotar lära sig att planera sitt eget arbete för att lösa komplexa uppgifter? Forskare på Chalmers har utvecklat en AI som kan iaktta mänskligt beteende och anpassa sig för att utföra uppgifter i en föränderlig miljö.
– Robotar som arbetar i mänskliga miljöer behöver ta hänsyn till att vi människor är unika och att vi löser samma uppgift på individuella sätt. Därför är ett viktigt område inom robotutveckling att lära robotar att arbeta nära människor i dynamiska miljöer, säger Maximilian Diehl, doktorand vid institutionen för elektroteknik och ledande forskare bakom projektet, i ett pressmeddelande.
Att vi människor kan hantera uppgifter efter existerande förutsättningar är sedan gammalt. Står något i vägen för oss att slutföra uppgiften flyttar vi helt enkelt på det eller går runt objektet – vi byter hand för att hitta andra vinklar när vi pusslar ihop saker och hittar lösningar under resans gång.
Robotar fungerar aningen annorlunda. De behöver – precis som det beskrivs i pressmeddelandet – exakt programmering hela vägen mot målet. Det innebär att de arbetar effektivt i miljöer där de hela tiden följer samma mönster, som i en fabrik. Men för att interagera tillsammans med människor inom exempelvis service eller sjukvård, krävs att robotarna utvecklar ett mycket mer flexibelt beteende.
Chalmersforskarna ville undersöka om de gick att lära en robot att lösa uppgifter på samma sätt som människor i en högre utsträckning. Det resulterade i att man skapade en förklarande AI som utvinner övergripande istället för specifik information vid en demonstration, för att sedan kunna planera mer flexibla vägar mot ett långsiktigt mål.
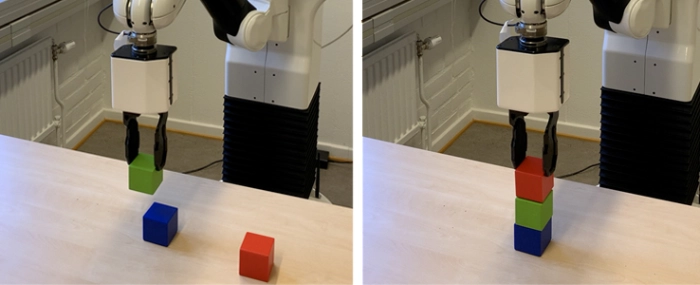
Forskarna lät människor utföra samma uppgift – att stapla kuber på varandra – tolv gånger i en VR-miljö. Varje gång utfördes uppgiften på olika sätt och människornas rörelser registrerades med hjälp av lasersensorer.
– När vi människor har en uppgift delar vi upp den i en kedja av mindre mål på vägen, och varje handling vi utför syftar till att uppfylla ett sådant delmål. Istället för att lära roboten en exakt imitation av mänskligt beteende fokuserade vi på vad målet var med alla de handlingar som människorna i studien utförde, säger Karinne Ramirez-Amaro, forskarassistent på institutionen för elektroteknik.
Forskarnas metod gick ut på att systemet extraherade meningen med delmålen, och byggde bibliotek bestående av olika handlingar för varje delmål. Slutligen skapade systemet en AI i form av ett planeringsverktyg som användes av en TIAGo-robot, designad för att arbeta i inomhusmiljöer. Med hjälp av verktyget kunde roboten automatiskt skapa en plan för att stapla kuber på varandra även när omgivningens förutsättningar förändrades.
Roboten fick därefter i uppgift att stapla kuber och valde sedan själv bland flera möjliga handlingar den sekvens som, efter omständigheterna, ledde till att uppgiften utfördes. Roboten klarade alltså att själv planera hur den skulle göra trots att förutsättningarna förändrades lite vid varje försök.
Maximilian Diehl berättar i pressmeddelandet att resultaten visade att metoden kan skapa planer som utförs korrekt till 92 procent efter en enda mänsklig demonstration, och hela 100 procent korrekt när informationen från alla tolv demonstrationer användes.
